Hybrid Mechatronics Lab
Enter the experiments Page Here.
Contact your professor to get your account setup to access the experiments.
Remotely Accessible Mechatronics Laboratory
Introduction and Motivation
Traditional engineering and technology laboratory courses is comprised of a small group of students and a demonstrator, grouped around a piece of hardware located in a laboratory. During a traditionally three hour lab session, students will conduct a series of experimental procedures as outlined in the laboratory handout, record the data from the hardware, and write report based on these data and underlying analytical theory in a few weeks. This traditional, proximal model is under increasing pressure because of the changing demands of engineering technology laboratory courses. Scheduling increasingly large numbers of small groups of students for three hour lab session of continuous and adequately supervised access to a set of expensive piece of laboratory equipment becomes more and more difficult and expensive task. In summary, typical constrains for real laboratories include: time limited access, restricted location, and high cost of equipment. An increasingly popular solution to this dilemma is the use of alternative access modes: either simulation (or virtual) laboratories or remote access to laboratory hardware.
To address these issues, we propose to develop a hybrid laboratory utilizing web-based virtual systems to complement the hands-on experiments of engineering technology curricula at College of Technology. The virtual laboratory will provide an inexpensive alternative that are more readily accessible and available to students. Virtual experiments give students access to simulated experiments or animated dynamic system simulations before the real-hands on laboratory lad session. Students will be able to play with more configurations in the virtual laboratory experiments to help them understand the underlying analytical theory, and prepare for the real lab session at their computer. The hands on lab session will be able to finish in less time, increase the utilization of the expensive hardware.
The requirements for experiments designed for the remotely accessible Mechatronics laboratory include:
- Enable the user to simulate different configurations for various Mechatronics experiments via internet;
- Enable the user to access and visualize simulation results via internet.
- Enable the user to implement various controllers via internet.
- Enable the smooth transition between virtual simulation and real life experiments.
System Architecture
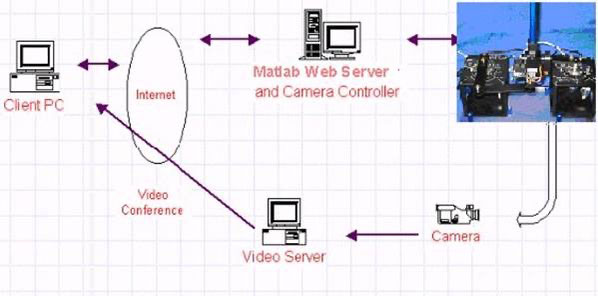
There are three main sub-systems in the proposed remotely accessible Mechatronics laboratory as shown in following picture:

- The plant: the physical system or equipment setups that needs to be controlled. Six equipment kits from Quanser? will be set up with different control experiments. The six equipment kits are: MECHKIT Mechatronics Kit, Analog Plant Simulator, QET DC motor control, Coupled Tank, Heat Flow, 2 DOF Robot and Gantry Module, and Rotary Flexible Link Module. To be able to control these experiments in real time, Q4 data acquisition board from Quanser? is embedded in a PC with corresponding terminal board with ADC and DAC to interact with equipment. Other equipment include UPM power module that provides power amplification for actuation purpose, as well as signal conditioning and amplification capability.
- The video supervisory system that controls the network video camera. AXIS 206 is used to capture the real-time reaction of the plant so that students accessing the lab remotely from the website can see in real-time the effect of the designed controller has on real plant.
- Optional energy-efficient lighting control system that will turn on the light when a student submit a request to do the lab remotely and turn the light off when there is no students doing the experiments.
- Java applets on client-server, and web-based user interface that integrates all parts.
Detailed system components for remote accessible Mechatronics lab
Three interfaces are designed for the system to seamlessly integrate physical equipment setup with Matlab / Simulink control platform; communicate between Matlab webserver and HTTP web server, as well as from HTTP server to client PC. The interface between physical equipment and Matlab/Simulink is established by installing operating system and its service pack, Run time RTX from Ardence, Visual C++, Matlab, Simulink, and Real Time Workshop from Mathworks, and WinCon server, WinCon Client, and WinCon Control from Quanser.